Robot Learning: Penerapan Machine Learning Pada Pembelajaran Robot
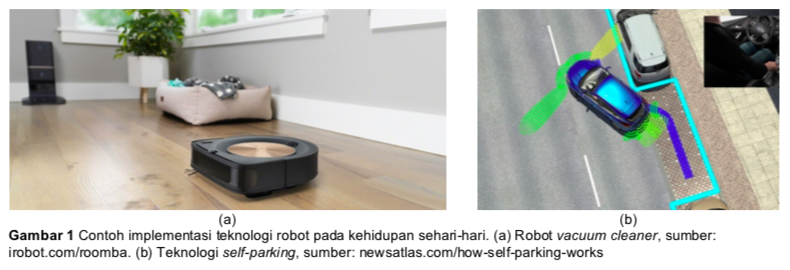
Seiring dengan perkembangan teknologi, tidak menutup kemungkinan bahwa di masa mendatang, manusia akan lebih banyak berinteraksi dengan robot dalam kehidupan sehari-hari. Di beberapa negara maju, teknologi robot bahkan sudah mulai banyak digunakan untuk membantu tugas manusia. Salah satu contohnya adalah penggunaan robot vacuum cleaneryang dapat secara otomatis mendeteksi debu pada lantai dan membersihkannya. Selain itu, di bidang otomotif, beberapa perusahaan terkemuka bahkan sudah mulai mengeluarkan beragam produk mobil yang memiliki kemampuan self-parking (lihat Gambar 1). Lantas, pernahkah kamu berpikir tentang bagaimana sebenarnya robot-robot itu bisa memiliki kemampuan tersebut sehingga dapat membantu tugas kita?
Apa itu robot learning?
Selain dengan melakukan pemrograman secara manual pada robot, salah satu cara yang dapat digunakan agar robot dapat memiliki kemampuan untuk melaksanakan tugas-tugas tertentu adalah dengan menggunakan pendekatan berbasis robot learning yang merupakan bidang irisan antara machine learning dan robotics. Dengan menggunakan teknik ini, artificial neural networks (ANN) yang saat ini umum dikenal dengan istilah deep learning diimplementasikan ke dalam robot sebagai representasi dari otak yang mampu melakukan proses pembelajaran. Melalui pendekatan ini, kita dapat melatih robot dengan cara melakukan proses training terhadap ANN melalui data latih yang didapatkan dari berbagai sensor yang tertanam pada robot. Tujuan akhir dari proses training tersebut adalah mendapatkan sebuah model ANN optimal yang mampu memetakan data dari sensor menjadi aksi tertentu sehingga robot dapat melakukan gerakan-gerakan yang tepat dan sesuai dengan tugas yang diberikan.
Implementasi robot learning: imitation learning dan reinforcement learning
Secara garis besar, mengimplementasikan robot learning berarti sama dengan melatih ANN. Lalu, pendekatan machine learning apa yang dapat kita gunakan dalam proses ini? Beberapa pendekatan yang dapat dipakai antara lain adalah imitation learning dan reinforcement learning. Berikut detail penjelasannya:
- Imitation Learning
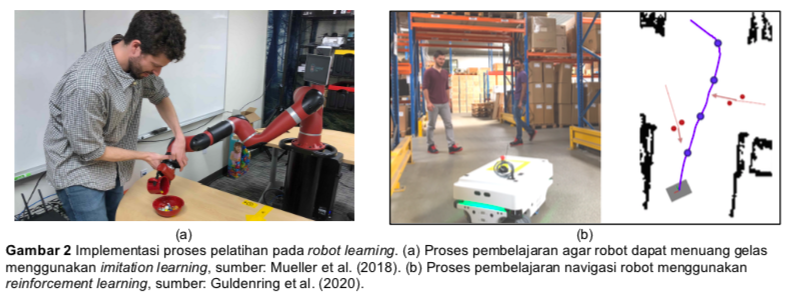
Dengan menggunakan imitation learning, robot akan dilatih untuk dapat meniru aksi-aksi yang dicontohkan oleh manusia untuk melakukan tugas tertentu. Pada tahapan pertama, semua data yang didapatkan ketika manusia melakukan contoh gerakan-gerakan yang tepat untuk tugas tertentu akan direkam dan akan dijadikan sebagai data latih. Selanjutnya, ANN pada robot akan dilatih menggunakan data latih yang sudah kita dapatkan tersebut. - Reinforcement Learning
Dengan menggunakan reinforcement learning, kita dapat melatih robot dengan menyiapkan sebuah environment khusus yang mampu menyediakan feedback berupa reward spesifik yang sesuai dengan tugas tertentu ketika robot melakukan interaksi. Nantinya, dengan menggunakan algoritma pembelajaran tertentu yang mampu memaksimalkan reward yang akan didapatkan di masa mendatang, robot akan belajar untuk menghasilkan aksi yang sesuai dengan tugas tertentu.
Bisakah belajar lebih jauh tentang robot learning di Informatika UII?
Jika tertarik dengan bidang robot learning, kamu bisa mengambil beberapa mata kuliah di Informatika UII sesuai dengan kurikulum 2020 seperti; SIF402: Sistem Cerdas dan Pendukung Keputusan, SIF403: Fundamen Data Sains, SIF903: Komputasi Lunak, SIF909: Big Data, SIF910: Deep Learning, dan juga SIF918: Teknologi Informasi Untuk Pembangunan. Selain itu, melalui kebijakan Merdeka Belajar, kamu juga bisa mengambil mata kuliah Topik Terpilih Bidang Teknologi dan Rekayasa terkait robotika.
Referensi
- C. Mueller, J. Venicx, and B. Hayes, Robust robot learning from demonstration and skill repair using conceptual constraints, in Proc. IEEE/RSJ Int. Conf. Intel. Robot. Sys. (IROS), 2018.
- R. Guldenring, M. Gorner, N. Hendrich, N. J. Jacobsen, and J. Zhang, Learning local planners for human-aware navigation in indoor environments, in Proc. IEEE/RSJ Int. Conf. Intel. Robot. Sys. (IROS), 2020.
Penulis: Chandra Kusuma Dewa
Dosen Informatika UII
Jurusan Informatika UII menerima kiriman artikel untuk ditampilkan pada Pojok Informatika dan Pojok Dakwah. Ketentuan dan prosedur pengiriman dapat dilihat pada laman berikut.



